Note
Go to the end to download the full example code.
Reconstruction of the diffusion signal with the kurtosis tensor model (DKI)#
Diffusional Kurtosis Imaging (DKI) is an expansion of the Diffusion Tensor Imaging (DTI) model (see Reconstruction of the diffusion signal with DTI (single tensor) model). In addition to the Diffusion Tensor (DT), DKI quantifies the degree to which water diffusion in biological tissues is non-Gaussian using the Kurtosis Tensor (KT) [1].
Measurements of non-Gaussian diffusion from DKI are of interest because they were shown to provide extra information about microstructural alterations in both health and disease (for a review see our paper [2]). Moreover, in contrast to DTI, DKI can provide metrics of tissue microscopic heterogeneity that are less sensitive to confounding effects in the orientation of tissue components, thus providing better characterization in general white matter configurations (including regions of fibers crossing, fanning, and/or dispersing) and gray matter [3], [2]. Although DKI aims primarily to quantify the degree of non-Gaussian diffusion without establishing concrete biophysical assumptions, DKI can also be related to microstructural models to infer specific biophysical parameters (e.g., the density of axonal fibers) - this aspect will be more closely explored in :ref:sphx_glr_examples_built_reconstruction_reconst_dki_micro.py. For additional information on DKI and its practical implementation within DIPY, refer to [2].
Below, we introduce a concise theoretical background of DKI and demonstrate its fitting process using DIPY. We’ll also guide you through the fitting process of DKI using DIPY, demonstrating how to effectively apply this technique. Furthermore, we discuss the various diffusion metrics that can be derived from DKI, providing insight into their practical significance and applications. Additionally, we address strategies to mitigate common artifacts, such as implausible negative kurtosis estimates, which manifest as ‘black’ voxels or holes in DKI maps. These artifacts can compromise the accuracy of the DKI analysis, and we’ll offer solutions to ensure more reliable results.
Theory#
The DKI model expresses the diffusion-weighted signal as:
where \(\mathbf{b}\) is the applied diffusion weighting (which is dependent on the measurement parameters), \(S_0\) is the signal in the absence of diffusion gradient sensitization, \(\mathbf{D(n)}\) is the value of diffusion along direction \(\mathbf{n}\), and \(\mathbf{K(n)}\) is the value of kurtosis along direction \(\mathbf{n}\). The directional diffusion \(\mathbf{D(n)}\) and kurtosis \(\mathbf{K(n)}\) can be related to the diffusion tensor (DT) and kurtosis tensor (KT) using the following equations:
and
where \(D_{ij}\) are the elements of the second-order DT, and \(W_{ijkl}\) the elements of the fourth-order KT and \(MD\) is the mean diffusivity. As the DT, KT has antipodal symmetry and thus only 15 Wijkl elements are needed to fully characterize the KT:
DKI fitting in DIPY#
In the following example we show how to fit the diffusion kurtosis model on diffusion-weighted multi-shell datasets and how to estimate diffusion kurtosis based statistics.
First, we import all relevant modules:
import numpy as np
from dipy.core.gradients import gradient_table
from dipy.data import get_fnames
from dipy.denoise.localpca import mppca
from dipy.io.gradients import read_bvals_bvecs
from dipy.io.image import load_nifti
import dipy.reconst.dki as dki
import dipy.reconst.dti as dti
from dipy.reconst.weights_method import simple_cutoff, weights_method_wls_m_est
from dipy.segment.mask import median_otsu
from dipy.viz.plotting import compare_maps
DKI requires multi-shell data, i.e. data acquired from more than one non-zero b-value. Here, we use fetch to download a multi-shell dataset which was kindly provided by Hansen and Jespersen (more details about the data are provided in their paper [4]). The total size of the downloaded data is 192 MBytes, however you only need to fetch it once.
fraw, fbval, fbvec, t1_fname = get_fnames(name="cfin_multib")
data, affine = load_nifti(fraw)
bvals, bvecs = read_bvals_bvecs(fbval, fbvec)
gtab = gradient_table(bvals, bvecs=bvecs)
Function get_fnames downloads and outputs the paths of the data,
load_nifti returns the data as a nibabel Nifti1Image object, and
read_bvals_bvecs loads the arrays containing the information about the
b-values and b-vectors. These later arrays are converted to the
GradientTable object required for Dipy’s data reconstruction.
The downloaded dataset was acquired with an unusually large number of b-values. To run this example with acquisitions that are more common in practice, we select below data for three non-zero b-values (if you want to run this example with the full data extent, skip the following lines of code)
bval_sel = np.zeros_like(gtab.bvals)
bval_sel[bvals == 0] = 1
bval_sel[bvals == 600] = 1
bval_sel[bvals == 1000] = 1
bval_sel[bvals == 2000] = 1
data = data[..., bval_sel == 1]
gtab = gradient_table(bvals[bval_sel == 1], bvecs=bvecs[bval_sel == 1])
Before fitting the data, we perform some data pre-processing. We first compute a brain mask to avoid unnecessary calculations on the background of the image.
datamask, mask = median_otsu(data, vol_idx=[0, 1], median_radius=4, numpass=2, dilate=1)
Since the diffusion kurtosis model involves the estimation of a large number of parameters [5] and since the non-Gaussian components of the diffusion signal are more sensitive to artifacts [6], [7], it might be favorable to suppress the effects of noise and artifacts before diffusion kurtosis fitting. In this example, the effects of noise are suppressed using the Marcenko-Pastur (MP)-PCA algorithm (for more information, see Denoise images using the Marcenko-Pastur PCA algorithm). Processing MP-PCA may take a while - for illustration purposes, you can skip this step. However, note that if you don’t denoise your data, DKI reconstructions may be corrupted by a large percentage of implausible DKI estimates (see below for more information on this issue).
data = mppca(data, patch_radius=[3, 3, 3])
Now that we have loaded and pre-processed the data we can go forward with DKI fitting. For this, the DKI model is first defined for the data’s GradientTable object by instantiating the DiffusionKurtosisModel object in the following way:
dkimodel = dki.DiffusionKurtosisModel(gtab, fit_method="WLS")
The fit_method argument gives the method that will be used when fitting
the data. Several options are available, such as weighted least squares
WLS (default) and RWLS (see Coveney et al.[8]). For
constrained fitting methods, see later in this example.
To fit the data using the defined model object, we call the fit function
of this object. For the purpose of this example, we will only fit a
single slice of the data:
dkifit = dkimodel.fit(data[:, :, 9:10], mask=mask[:, :, 9:10])
The fit method creates a DiffusionKurtosisFit object, which contains all the
diffusion and kurtosis fitting parameters and other DKI attributes. For
instance, since the diffusion kurtosis model estimates the diffusion tensor,
all standard diffusion tensor statistics can be computed from the
DiffusionKurtosisFit instance. For example, we can extract the fractional
anisotropy (FA), the mean diffusivity (MD), the radial diffusivity (RD) and
the axial diffusivity (AD) from the DiffusionKurtosisiFit instance. Of
course, these measures can also be computed from DIPY’s TensorModel fit,
and should be analogous; however, theoretically, the diffusion statistics
from the kurtosis model are expected to have better accuracy, since DKI’s
diffusion tensor are decoupled from higher order terms effects
[9], [2]. Below we compare
the FA, MD, AD, and RD, computed from both DTI and DKI.
tenmodel = dti.TensorModel(gtab)
tenfit = tenmodel.fit(data[:, :, 9:10], mask=mask[:, :, 9:10])
fits = [tenfit, dkifit]
maps = ["fa", "md", "rd", "ad"]
fit_labels = ["DTI", "DKI"]
map_kwargs = [{"vmax": 0.7}, {"vmax": 2e-3}, {"vmax": 2e-3}, {"vmax": 2e-3}]
compare_maps(
fits,
maps,
fit_labels=fit_labels,
map_kwargs=map_kwargs,
filename="Diffusion_tensor_measures_from_DTI_and_DKI.png",
)
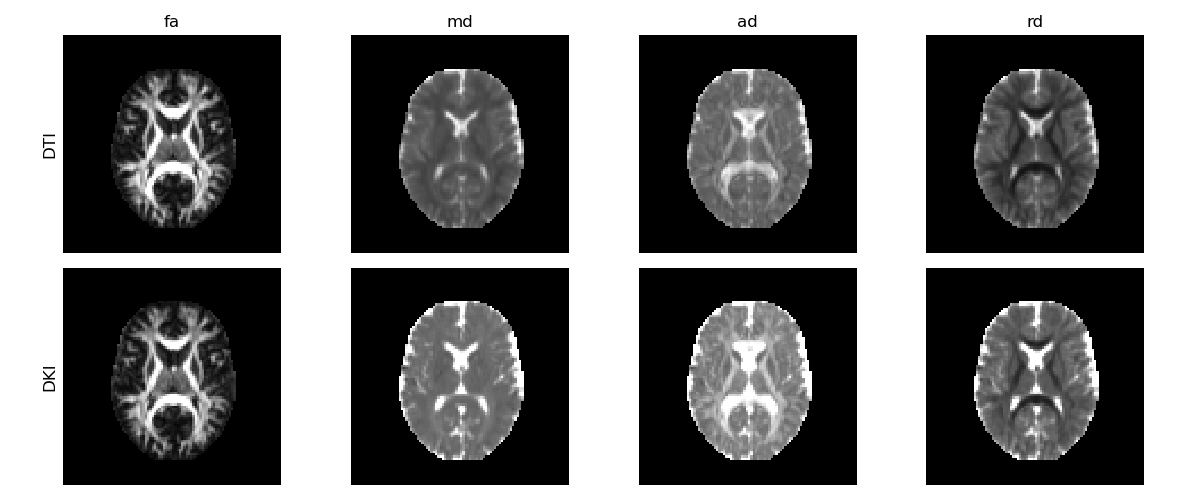
Diffusion tensor measures obtained from the diffusion tensor estimated from DKI (upper panels) and DTI (lower panels).
DTI’s diffusion estimates present lower values than DKI’s estimates, showing that DTI’s diffusion measurements are underestimated by higher order effects (for detailed discussion on this see [2].
In addition to the standard diffusion statistics, the DiffusionKurtosisFit instance can be used to estimate the non-Gaussian measures of mean kurtosis (MK), the radial kurtosis (RK) and the axial kurtosis (AK).
maps = ["mk", "rk", "ak"]
compare_maps(
[dkifit],
maps,
fit_labels=["DKI"],
map_kwargs={"vmin": 0, "vmax": 1.5},
filename="DKI_standard_measures.png",
)
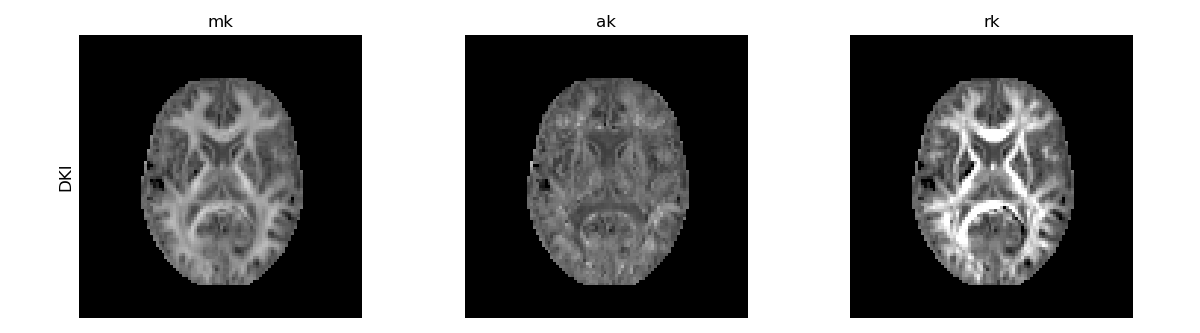
DKI standard kurtosis measures.
The non-Gaussian behaviour of the diffusion signal is expected to be higher when tissue water is confined by multiple compartments. MK is, therefore, higher in white matter since it is highly compartmentalized by myelin sheaths. These water diffusion compartmentalization is expected to be more pronounced perpendicularly to white matter fibers and thus the RK map presents higher amplitudes than the AK map.
Mitigating ‘Black’ Voxels / Holes in DKI metrics#
It is important to note that kurtosis estimates might present implausible negative estimates in deep white matter regions that will manifest as ‘Black’ voxels or holes in DKI metrics (e.g. see the band of dark voxels in the RK map above). These negative kurtosis values are artifactual and might be induced by:
Low radial diffusivities of aligned white matter - since it is very hard to capture non-Gaussian information in radial direction due to its low diffusion decays, radial kurtosis estimates (and consequently the mean kurtosis estimates) might have low robustness and tendency to exhibit negative values [6], [7];
Gibbs artifacts - MRI images might be corrupted by signal oscillation artifact between tissue’s edges if an inadequate number of high frequencies of the k-space is sampled. These oscillations might have different signs on images acquired with different diffusion-weighted and inducing negative biases in kurtosis parametric maps [10], [11].
Underestimation of b0 signals - Due to physiological or noise artifacts, the signals acquired at b-value=0 may be artifactually lower than the diffusion-weighted signals acquired for the different b-values. In this case, the log diffusion-weighted signal decay may appear to be concave rather than showing to be convex (as one would typically expect), leading to negative kurtosis value estimates.
Given the above, one can try to suppress the ‘Black’ voxel / holes in DKI metrics by:
Using more advanced noise and artifact suppression algorithms, e.g., as mentioned above, the MP-PCA denoising (Denoise images using the Marcenko-Pastur PCA algorithm), other denoising alternatives such as Patch2self (Patch2Self: Self-Supervised Denoising via Statistical Independence) or incorporating methods for Gibbs Artifact Unringing (Suppress Gibbs oscillations) algorithms.
Computing the kurtosis values from powder-averaged diffusion-weighted signals which are known to be less sensitive to implausible negative estimates. The details on how to compute the kurtosis from powder-averaged signals in DIPY are described in the following tutorial (Mean signal diffusion kurtosis imaging (MSDKI)).
Computing alternative definitions of mean and radial kurtosis such as the mean kurtosis tensor (MKT) and radial tensor kurtosis (RTK) metrics (see below).
Constrained optimization to ensure that the fitted parameters are physically plausible [12] (see below).
Alternative DKI metrics#
In addition to the standard mean, axial, and radial kurtosis metrics shown above, alternative metrics can be computed from DKI, e.g.:
The mean kurtosis tensor (MKT) - defined as the trace of the kurtosis tensor - is a quantity that provides a contrast similar to the standard MK but it is more robust to noise artifacts [13], [2].
The radial tensor kurtosis (RTK) provides an alternative definition to standard radial kurtosis (RK) that, as MKT, is more robust to noise artifacts [13].
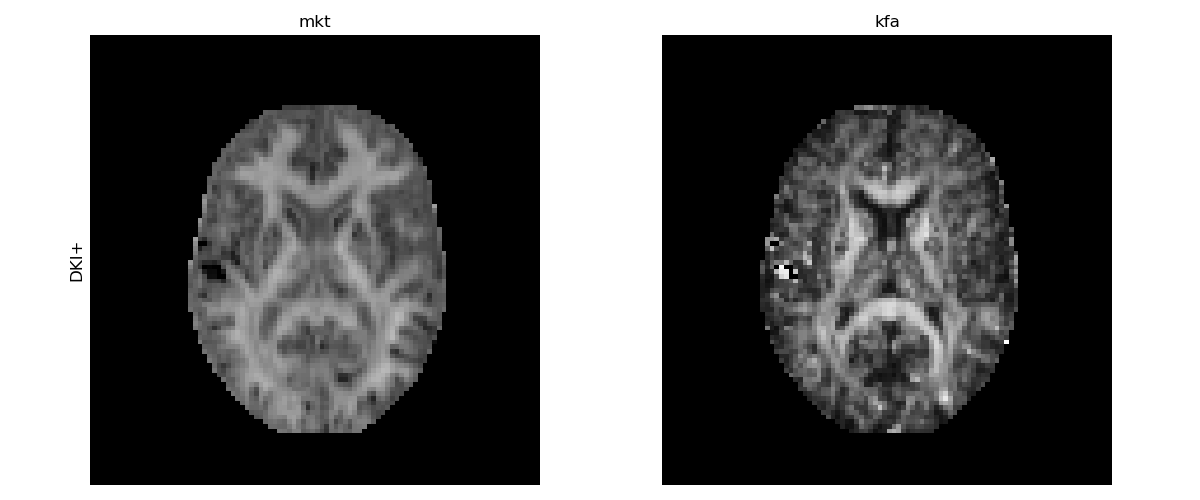
The kurtosis fractional anisotropy (KFA) that quantifies the anisotropy of the kurtosis tensor [14], which provides different information than the FA measures from the diffusion tensor.
These measures are computed and illustrated below:
compare_maps(
[dkifit],
["mkt", "rtk", "kfa"],
fit_labels=["DKI"],
map_kwargs=[
{"vmin": 0, "vmax": 1.5},
{"vmin": 0, "vmax": 1.5},
{"vmin": 0, "vmax": 1},
],
filename="Alternative_DKI_metrics.png",
)
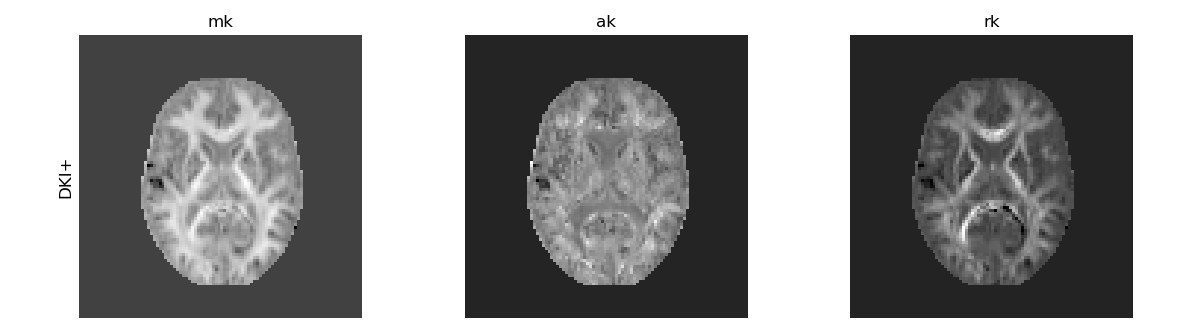
Alternative DKI measures.
Constrained optimization for DKI#
When instantiating the DiffusionKurtosisModel, the model can be set up to use
constraints with the option fit_method='CLS' (for ordinary least squares)
or with fit_method='CWLS' (for weighted least squares). Constrained fitting
takes more time than unconstrained fitting, but is generally recommended to
prevent physically implausible parameter estimates
[12]. For performance purposes it is recommended to use
the MOSEK solver (https://www.mosek.com/) by setting cvxpy_solver='MOSEK'.
Different solvers can differ greatly in terms of runtime and solution
accuracy, and in some cases solvers may show warnings about convergence or
recommended option settings.
Note
In certain atypical scenarios, the DKI+ constraints could potentially be too restrictive. Always check the results of a constrained fit with their unconstrained counterpart to verify that there are no unexpected qualitative differences.
# rescale for constrained DKI methods (will affect units, but not kurtosis)
BVALS_SCALING = 0.001
bvals = bvals * BVALS_SCALING
gtab = gradient_table(bvals[bval_sel == 1], bvecs=bvecs[bval_sel == 1])
dkimodel_plus = dki.DiffusionKurtosisModel(gtab, fit_method="CWLS")
dkifit_plus = dkimodel_plus.fit(data[:, :, 9:10], mask=mask[:, :, 9:10])
We can now compare the kurtosis measures obtained with the constrained fit to the measures obtained before, where we see that many of the artifactual voxels have now been corrected. In particular outliers caused by pure noise – instead of for example acquisition artifacts – can be corrected with this method.
compare_maps(
[dkifit, dkifit_plus],
["mkt", "rtk", "ak"],
fit_labels=["DKI", "DKI+"],
map_kwargs={"vmin": 0, "vmax": 1.5},
filename="Alternative_DKI_measures_comparison_to_DKIplus.png",
)
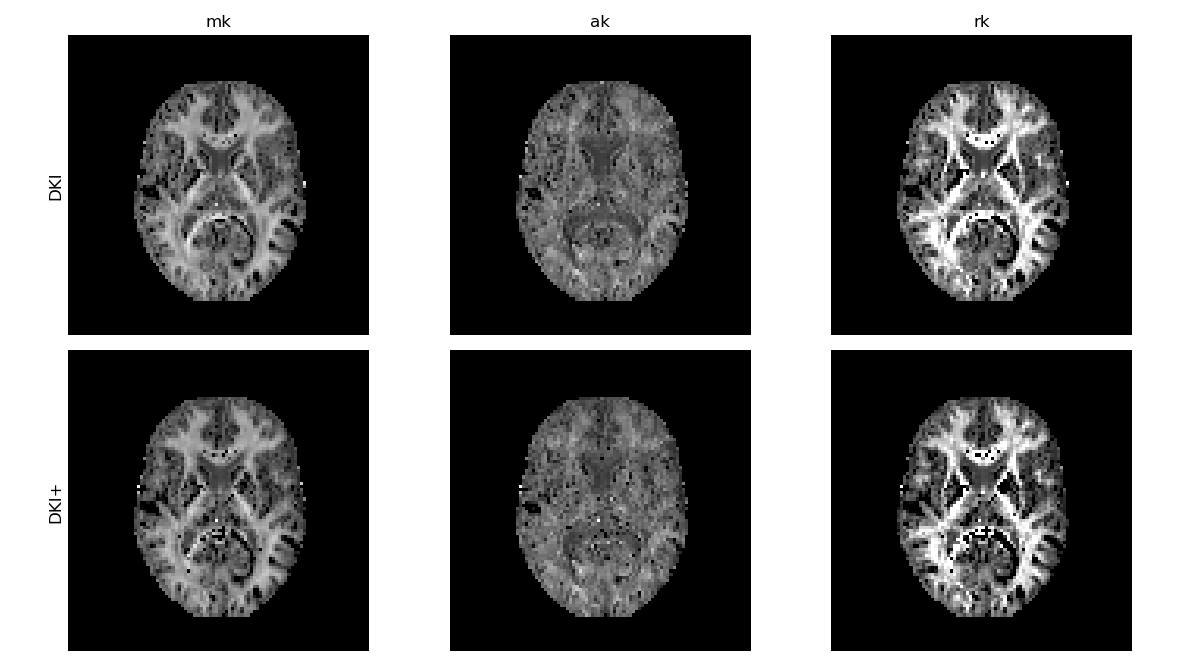
DKI standard kurtosis measures obtained with constrained optimization.
It is also possible to combine robust fitting methods and constrained fitting
methods, as done in Coveney et al.[15]. For Robust CWLS (RCWLS), we
need to use the CWLS fitting method with a weights_method, which will
cause DIPY to use iteratively reweighted least squares (fitting with CWLS on
each iteration) making use of the weights method.
def GMM_weights(*args):
"""Geman-McClure weights with outliers defined by +/-3 standard
deviations.
"""
return weights_method_wls_m_est(
*args, m_est="gm", cutoff=3, outlier_condition_func=simple_cutoff
)
dkimodel_rcwls = dki.DiffusionKurtosisModel(
gtab, fit_method="CWLS", return_S0_hat=True, weights_method=GMM_weights, num_iter=6
)
dkifit_rcwls = dkimodel_rcwls.fit(data[:, :, 9:10], mask=mask[:, :, 9:10])
compare_maps(
[dkifit_plus, dkifit_rcwls],
["mkt", "rtk", "ak"],
fit_labels=["DKI+", "robust DKI+"],
map_kwargs={"vmin": 0, "vmax": 1.5},
filename="Compare_CWLS_and_RCWLS.png",
)
/Users/skoudoro/devel/dipy_wt/release/dipy/reconst/dki.py:1752: RuntimeWarning: divide by zero encountered in log
X = np.concatenate((dt, fkt[v] * MD * MD, np.array([-np.log(this_S0)])), axis=0)
/Users/skoudoro/devel/dipy_wt/release/dipy/reconst/dki.py:1752: RuntimeWarning: divide by zero encountered in log
X = np.concatenate((dt, fkt[v] * MD * MD, np.array([-np.log(this_S0)])), axis=0)
/Users/skoudoro/devel/dipy_wt/release/dipy/reconst/dki.py:1752: RuntimeWarning: divide by zero encountered in log
X = np.concatenate((dt, fkt[v] * MD * MD, np.array([-np.log(this_S0)])), axis=0)
/Users/skoudoro/devel/dipy_wt/release/dipy/reconst/dki.py:1752: RuntimeWarning: divide by zero encountered in log
X = np.concatenate((dt, fkt[v] * MD * MD, np.array([-np.log(this_S0)])), axis=0)
/Users/skoudoro/devel/dipy_wt/release/dipy/reconst/dki.py:1752: RuntimeWarning: divide by zero encountered in log
X = np.concatenate((dt, fkt[v] * MD * MD, np.array([-np.log(this_S0)])), axis=0)
Constrained WLS vs robust constrained WLS for DKI.
Note
See here for more information on constructing weight functions and outlier functions.
References#
Total running time of the script: (12 minutes 51.595 seconds)